2022-2023 COMPETITION
original claw
|
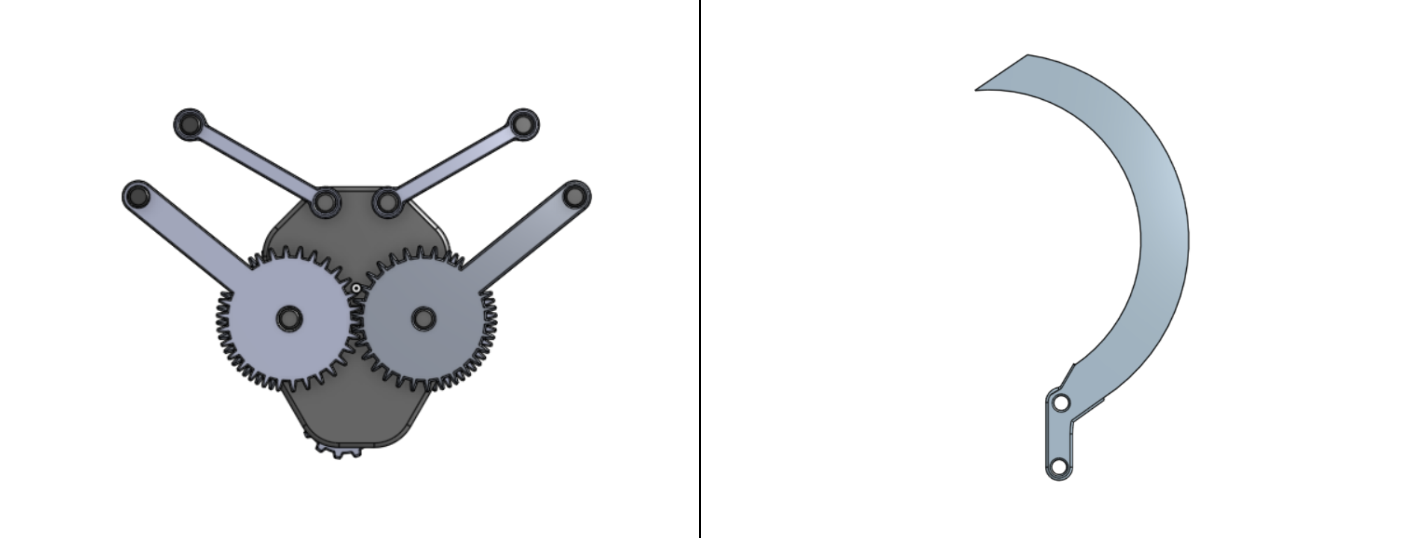
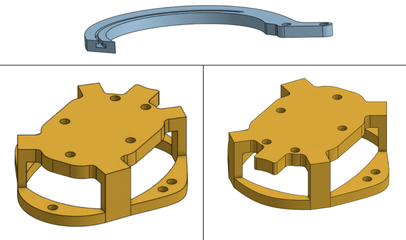
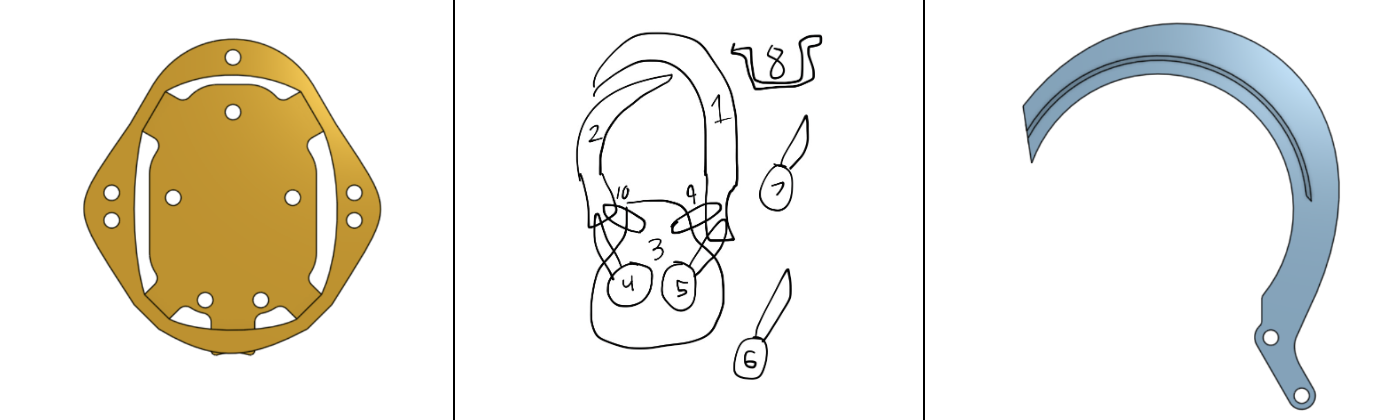
MODIFIED CLAW
The design was modified for the second qualifier. The grip part was redesigned to fit the cone better. The base was modified to allow for an upright servo and for more stability. The grips were modified to include a connection to keep them in place and in line with each other. The servo is now mounted to the gears themselves and the design uses bezier curves for a smooth look. The design was also broken down into multiple parts and there were given identify numbers. This was the first time we printed using supports. The support hole on the base was centered to allow for more support and extra holes added more places for attachments.
|
|
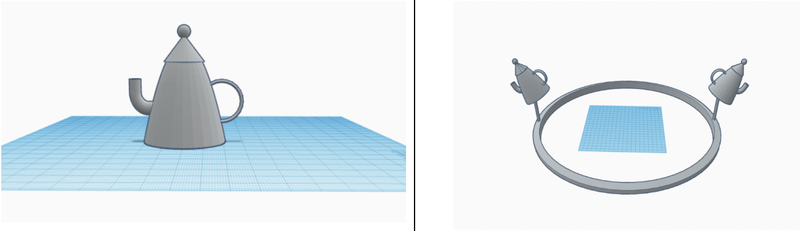
Beacon
The beacon design was based off of the teapot statue in old Salem that marks the beginning of the historic area. The original design was one large teapot, however it was changed when it became clear it would not work with the intake design.
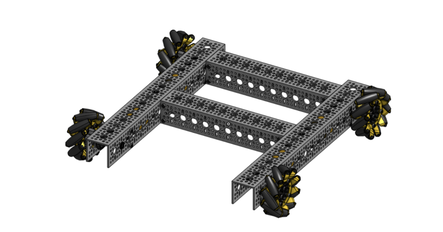
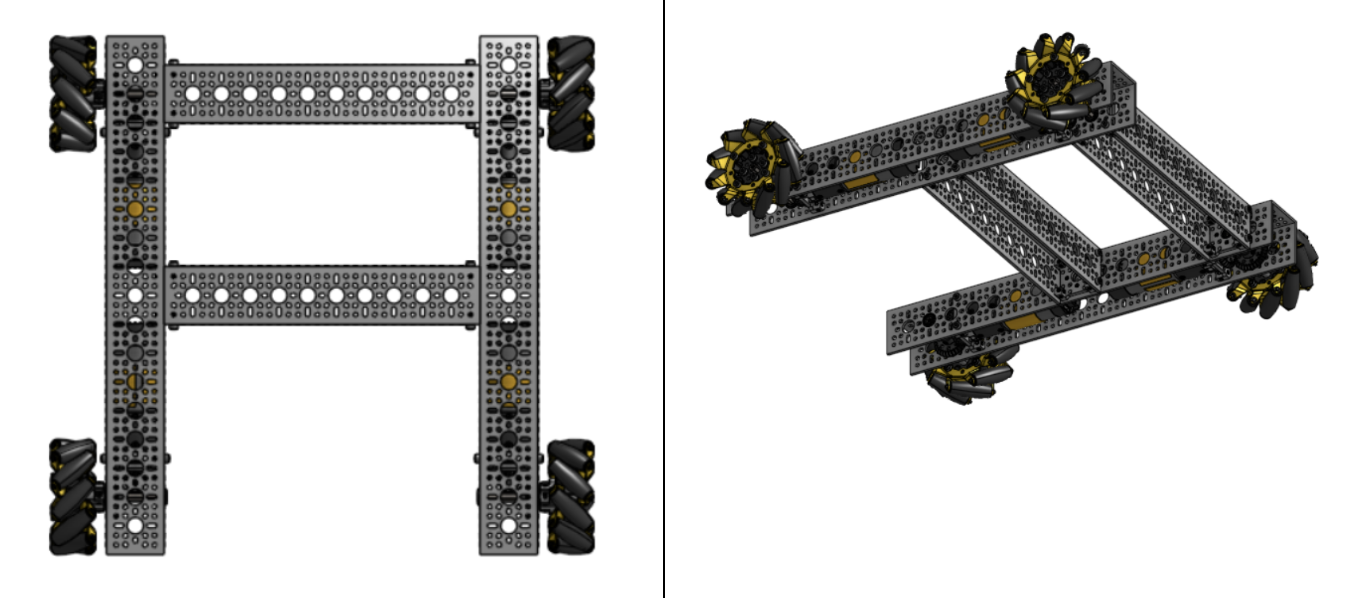
Chassis
Code Sisters uses a standard strafer chassis with few design modifications
|
|
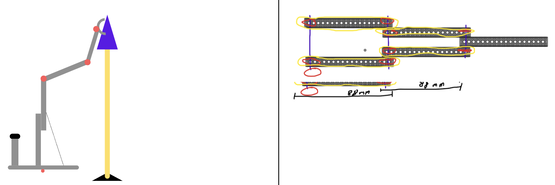
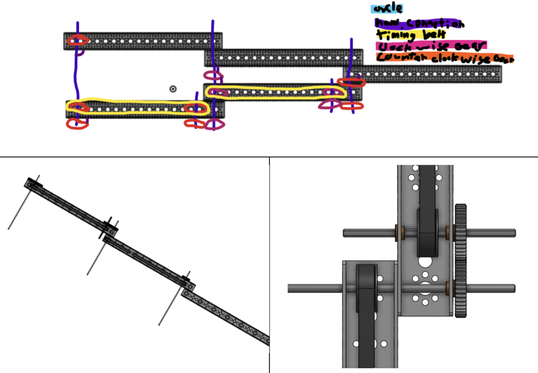
ARm
The original design of the robot featured an arm. The arm used timing belts and tetrix channels. The arm was first designed via simple drawing and expanded on from there.
|
|
issues
There were many issues throughout the process. Instead of giving up, we work through them and persevere!
- The 3D printer printed at 1/3 the size, this meant that we were unable to use 3D models of servos and real parts to guide the CAD. To fix this problem we used a lot of calculations to find the right size and dimensions. In the worse case scenario, we were able to solder the holes into the correct place.
- The 3D printer broke! But we found ways to make the design work in other ways.
- Designs fell through. We learned valuable lessons and kept moving forward.
