FIRST ENERGIZE: 2023
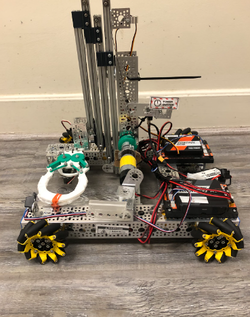
To the right is is our team's robot, Gru, competing in this year's competitions.
Challenge:
Challenge:
- Use the claw in order to pick up cones and place them onto height-varied poles.
- Our linear slide is controlled using servos placed at the base, and the claw is also controlled using servos.
- Place remaining cones and then park in a designated location to gain points.
- This robot is built from a GoBilda strafer chassis. We moved the chassis closer to make it more narrow so that they could fit in between the poles. As a lift, we are using a linear slide which is connected to a U-channel by L-brackets. The linear slide is able to reach up to 35 inches from the bottom of the chassis to the top of the slide. On the top of the slide is a claw which is used as our intake system. A servo is connected to the claw, it tells the claw when to open and close so it can hold onto the cones.
- Winston-Salem Qualifier
- 1st Place Promote Award
- 3rd Place Connect Award
freight frenzy: 2022
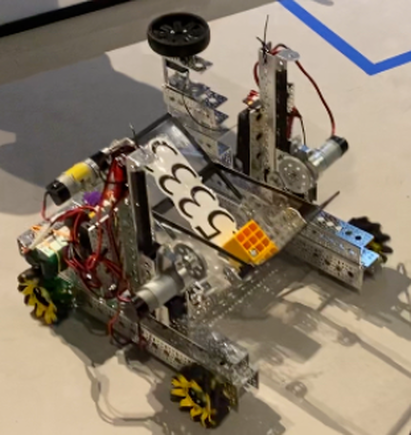
Here is our team's robot, Vector, for the challenge Freight Frenzie!
Challenge:
Challenge:
- Use the intake system to gather ducks and use our freight and sweeper system to launch the ducks into a three-tiered tower.
- Both our Sweeper and out Spinner are programmed using Java, and are controlled with separate motors. Each of our wheels is controlled using a motor.
- Park in a designated location to gain points.
- Our robot is built up from a GoBuilda chassis which we modified to have a single crossbar running across the center. The chassis has the motors for the mecanum wheels mounted at a right angle to the wheels and spinning on a worm gear system. Perpendicular to the cross bar are dual rack and pinion sets functioning as a lift for our pan, rotated on a motor powered axle, which delivers freight from the front end to the back end of the robot. The freight is ushered in the front by a sweeper piece on a motor, and sized to only manipulate one piece of freight at a time. Our duck turner is a rubber wheel on a continuous rotation servo at the front right wheel of the robot.
- Winston-Salem Qualifier
- 1st Place Motivate Award
- 1st Place Compass Award
- Second Qualifier
- 1sst Place Promote Award
- 1st Place Compass Award
- 3rd Place Connect Award
- States
- 1st Place Compass Award
ULTIMATE GOAL: 2021

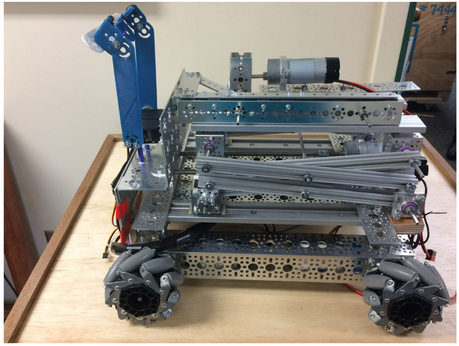
To the right is the team's robot for the competition Ultimate goal! This robot was named Thaita.
Challenge:
Challenge:
- Shooting rings into the chute.
- Our projection mechanism is powered by a motor which will cause the wheel to spin, pulling in the ring. This will then project it from the front of the robot. Each of our four wheels are also controlled by a motor.
- Continuing to shoot the rings into the goal a max of two times, then pushing the wobble back into its zone.
- We have re-evaluated our build strategy for this year because covid has forced us to have a virtual season, so we started prototyping and flushing out all of our designs in CAD first. We prepared a very specific build strategy so that we could come in person to build the robot quickly and efficiently. Then, we managed to have members meet in person the week before qualifiers to assemble the robot and make adjustments as needed.
- Qualifier
- 3rd Place Think Award!
Skystone: 2020
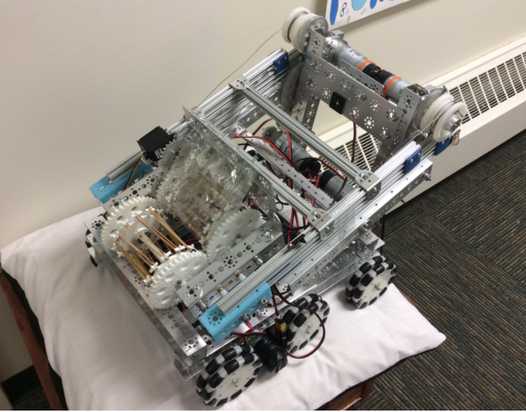
To the right is the team's robot for the competition, Skystone! This robot was named Replay.
Challenge:
|
ROVER RUCKUS: 2019To the right is a photo of Code Sister's robot, dubbed Wendy. Team spirits were high while building this beauty!
Challenge:
|
|
